





Voorkom dat Marsrovers zich vastrijden
Verken het marsoppervlak
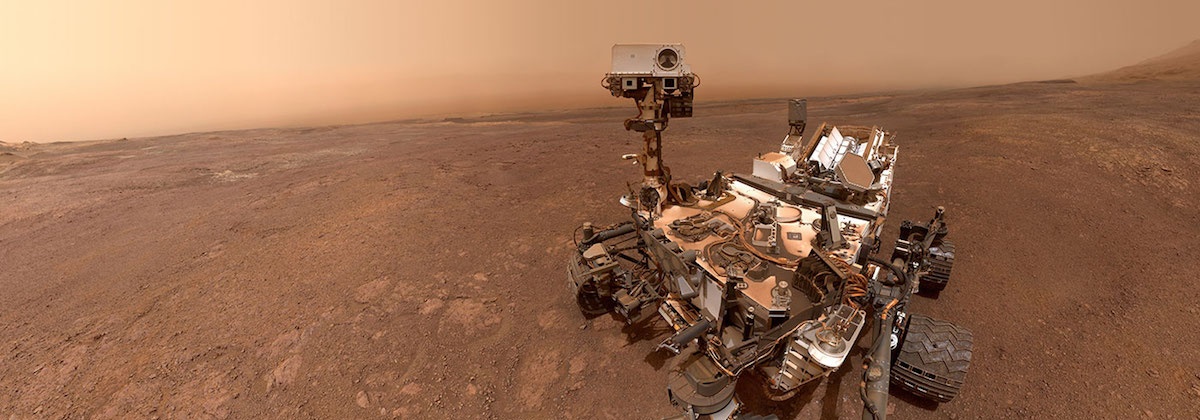
Marsverkenners rijden zichzelf wel eens vast op de rode planeet. Door het terrein zelf te bestuderen kan jij dat helpen te voorkomen.
Wat ga je doen?
Je kan hier klikken om meteen naar de website van het project te gaan. Je krijgt links op je scherm beelden te zien van het marsoppervlak, gemaakt door de rover Curiosity. Het is de bedoeling dat je verschillende types van het terrein afbakent met de tekentool. Dit kan zand zijn, maar ook rotsen, kleinere stenen of een rotsachtige bodem. Het trapezium dat je in het midden ziet, dient als visueel hulpmiddel. De breedte ervan is steeds 50 cm. Elementen in het terrein die kleiner zijn dan 50 cm, mag je gewoon negeren. De bovenkant van het trapezium geeft het terrein aan dat minstens 30 meter verder ligt. Dit mag je eveneens negeren. Ook vragen de onderzoekers om de verschillende velden die je hebt getekend niet met elkaar te laten overlappen.
Waarom doe je mee?
Het is een hele opdracht voor een Marsrover om zich probleemloos over het terrein van de planeet te begeven. Zo zijn de bekende rovers Curiosity en Opportunity al meermaals in het zand blijven vastzitten, al konden ze zich gelukkig wel vrijmaken en verdergaan met hun missie. De wetenschappers achter Al4Mars hopen om met hun onderzoek de rovers uit te rusten met een eigen herkenningsysteem, waarmee ze zelf gevaarlijke plekken op het terrein kunnen herkennen en vermijden. Om dit mogelijk te maken, is een zelflerend systeem nodig. De rovers moeten getraind worden met heel wat gegevens die al gecatalogeerd zijn als 'veilig' of 'te vermijden'. En die trainingsgegevens, daarvoor hebben de onderzoekers jou nodig.
Wie kan meedoen?
Iedereen die wat Engels begrijpt. Je hebt een pc nodig die verbonden is met het internet.
Wie organiseert het?
Al4Mars wordt georganiseerd door onder meer Hiro Ono. Ono is hoofd van de Robotic Surface Mobility Group en is doctor in de aeronotica en astronautica. Hij is vooral geïnteresseerd in artificiële intelligentie en in zijn onderzoek spitst hij zich toe op het autonoom maken van ruimtemissies, om zo de veiligheid, efficiëntie en prestaties te verbeteren van robots die worden ingezet.